
Roboter sind ein sehr beliebtes Einstiegsprojekt für den Raspberry Pi, da man damit viel lernen kann, Spaß hat und jede Menge zusätzliche Hardware anbringen kann. So kann ein Roboter z.B. automatisch Linien folgen, Gesichter erkennen und folgen, Abstände messen und dadurch autonom fahren. Oder wir steuern einen Roboter einfach manuell wie ein ferngesteuertes Auto.
Das PiCar-X Kit bietet all diese Funktionen (und noch etwas mehr) und kann dazu noch manuell erweitert werden. Vor allem für Anfänger eignet sich dieses Raspberry Pi Roboter-Kit mit 4 Rädern besonders, da es nicht so viel Programmierkenntnisse voraussetzt, wie unser komplett selbstgebauter Roboter.
Zubehör für das Roboter Auto
Das Roboter-Set hat bereits fast alles dabei, jedoch nicht alles. Du brauchst folgende Teile, um das PiCar-X nutzen zu können:
- PiCar-X Roboter-Kit (alternativ direkt aus China)
- Raspberry Pi (mindestens Version 3)
- SD-Karte mit mindestens 8 GB
- 2x 3.7V Akku (Typ 18650), ggf. mit Ladegerät
Weiteres Zubehör, welches genutzt werden kann, ist Folgendes:
- Solarpanel (5V Spannung oder mehr, ich empfehle mindestens 4-5 Watt)
- Xbox Controller o.ä. zum Fernsteuern
Natürlich kannst du auch noch weitere Ideen umsetzen, da das Board Erweiterungen zulässt. So steht der I2C Bus zur Verfügung, sowie die nicht genutzten GPIOs. Auch die USB-Anschlüsse sind weiterhin frei.
Aufbau – Anleitung zum Zusammenbau und Start
Fangen wir mit dem Aufbau des Roboters an. Zwar ist eine gedruckte Anleitung bei dem Kit dabei, allerdings geht der Aufbau wesentlich schneller voran, wenn man diesem Video folgt:
Bei mir hat der gesamte Aufbau ca. eine Stunde gedauert. Kinder könnten hier etwas länger brauchen. Einige Schrauben sind allerdings sehr klein, weshalb eine helfende Hand eines Erwachsenen auch sinnvoll ist. Insgesamt ist der Aufbau aber nicht schwer und macht Spaß. Wundere dich nicht, falls einige Schrauben übrig bleiben.
Folgende Features sind beim PiCar-X enthalten:
- Steuerbar per Weboberfläche (Smartphone, Tablet, etc.)
- stabile Metallkarosserie
- Hinterachsen-Antrieb mit zwei Motoren
- zwei Vorderreifen, die mittels Servomotor gelenkt werden
- Ultraschall-Abstandssensor vom Typ HC-SR04
- offizielles Raspberry Pi Kameramodul, welches in alle Richtungen gedreht werden kann
- Sensor zum Erkennen von Linien
- Lautsprecher
- erkennt den Ladestatus der Batterien
Alle Module werden an einem eigens entwickelten Raspberry Pi HAT angeschlossen, weshalb die Verkabelung sehr einfach ist.
Welche Software brauche ich für den Roboter?
Nachdem wir den Roboter komplett aufgebaut haben, kümmern wir uns um die Software. Dazu flashen wir eine modifizierte Raspberry Pi OS Version mit Ezblock auf die SD-Karte. Die neueste Version können wir hier herunterladen. Anschließend nutzen wir balenaEtcher, um das Image auf die SD-Karte zu schreiben.
Ich empfehle außerdem das Wifi direkt zu konfigurieren, wie hier ausführlich beschrieben ist. Nachdem du die SD-Karte in den Raspberry Pi gesteckt hast, kannst du den Roboter starten.
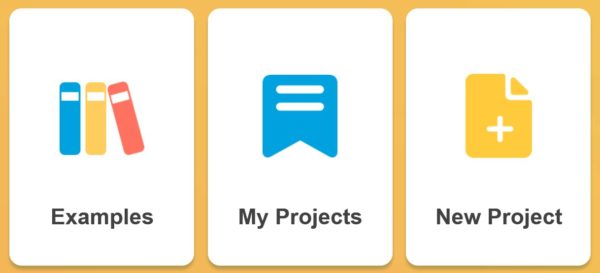
Wir wechseln nun zum Ezblock Studio Web-Editor. Du kannst dich registrieren, um eigens erstellte Code-Blöcke zu speichern. Wähle hier zunächst „Examples“ aus.
Danach wirst du gefragt, welches Produkt du hast. Wähle PiCar-X.
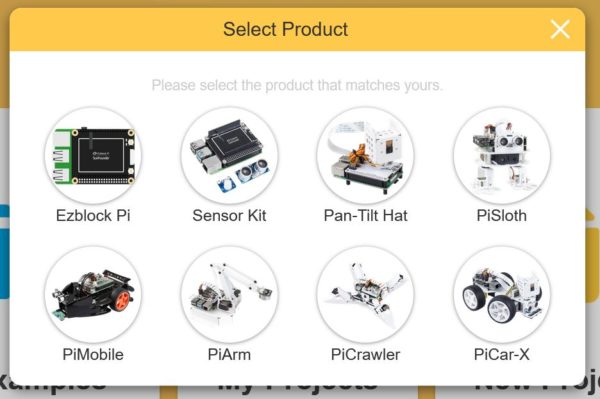
Anschließend siehst du eine große Auswahl an Beispielen, welche du ausprobieren kannst.
Erster Start – Roboter fahren
Der Ablauf ist für jedes Beispiel identisch, daher fange ich mit dem Einfachsten an. Wähle das „Remote Control“ Beispielprojekt aus. Anschließend musst du dich mit dem Raspberry Pi verbinden. Hierfür ist es wichtig, dass der Pi mit dem selben Netzwerk verbunden ist.
Klicke oben links auf das Profilbild und anschließend auf Connect.
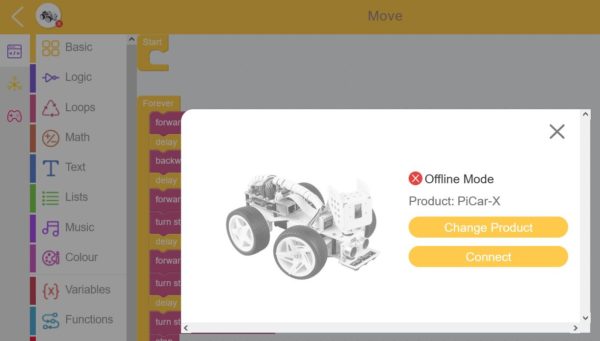
Hier kannst du entweder die lokale IP-Adresse (192.168.x.x) angeben, oder, falls du diese nicht kennst, einfach den Hostnamen (raspberrypi).
Anschließend kannst du unten rechts auf den Play Button drücken und das Programm startet. Du bekommst einen Joystick angezeigt, mit dem du den Roboter einfach steuern kannst.
Weitere Beispiele
Da dieses Beispiel sehr einfach ist, gibt es noch weitere Projekte zur Inspiration:
- Move: Here, we let it perform the five actions of „forward“, „backward“, „turn left“, „turn right“, and „stop“ in order.
- Remote Control: Let us control the PiCar-X with a tablet.
- Ultrasonic Sensor Test: Here we use Ultrasonic module to read the distance (unit: cm).
- Grayscale Sensor Test: Here we use Grayscale module to read the grayscale value.
- Color Detection: PiCar-X is a camera Robot used to detect a specific color or face numbers, the position and size of the captured image.
- Human Face Detection: In addition to color detection, PiCar-X also provides face detection.
- Sound Effect: PiCar-X can make voice. You can enter text to make it speak, or make specific sound effects.
- Background Music: Use a Switch here to control the playing or stopping of background music.
- Say Hello: Remotely control PiCar’s movement, and it will always look ahead. When it sees people, it will nod and say „Hello“.
- Music Car: Next we try to make a music car that walks around your home, plays music and brings you a good mood.
- Cliff Detection: Use the grayscale module to prevent the car from falling off the cliff when it moves freely.
- Minecart: Let’s make a minecart project! Stick a dark-colored tape on the white ground as the straight track, and make the PiCar-X move along the track.
- Minecart Plus: Derailment treatment was added on the basis of Minecart to adapt to the more severe curve following.
- Bullfight: Turn PiCar-X into an angry bull! Prepare a red cloth. When PiCar-X chases after the red cloth, be careful not to be hit by it.
Aus jedem Projekt kannst du dir entsprechende Bausteine ansehen und in dein eigenes Projekt übernehmen. Weitere Einführungsvideos zum PiCar-X gibt es übrigens auf dem YouTube Kanal von Sunfounder.
Mögliche Erweiterungen des PiCar-X
Wie vorher erwähnt, kann das Roboter-Kit auch einfach erweitert werden. Hier gibt es ein paar Add-ons, die meiner Meinung nach besonders sinnvoll sind.
Zunächst einmal wäre da ein Solarmodul. Die Akkus entladen sich recht schnell, da der Raspberry Pi alleine schon mindestens 5 Watt benötigt. Dazu kommt der Verbrauch der Motoren, Kamera und anderen Sensoren. Daher bietet es sich an, die Batterien während der Fahrt mit einer Solarzelle aufzuladen. Diese wird obendrauf montiert. Somit ist es im Idealfall nicht mehr nötig, die Akkus manuell zu laden.
Eine weitere Erweiterung ist ein manueller Controller. Zwar ist das autonome Fahren bzw. das Steuern per Weboberfläche ganz nett, aber ein echtes ferngesteuertes Auto braucht eine Fernbedienung. Hierfür könnten wir z.B. einen Xbox Controller nutzen, so wie wir es bei unserem selbstgebauten Roboter in der Vergangenheit bereits getan haben. Auch ein anderer Controller (kabellos oder kabelgebunden) kann dafür genutzt werden.
Darüber hinaus gibt es mit Sicherheit noch viele weitere Ideen, die man einfach umsetzen könnte. Du kannst gerne einen Kommentar hinterlassen.
Fazit zum Raspberry Pi PiCar-X Roboter Auto
Ein Raspberry Pi Roboter ist gerade für Kinder und Jugendliche ein sehr spannendes Projekt. Da gerade Anfänger wenig Erfahrung in der Programmierung und dem Zusammenbau haben, ist ein komplettes Set eine tolle Option. Durch die Nutzung der programmierbaren Blöcke muss nicht einmal eine Zeile Code geschrieben werden. Wer dennoch lieber sein eigenes Coding verwenden möchte, der kann dies per Python tun.
Etwas schade finde ich, dass die 3.7V Akkus vom Typ 18650 nicht inklusive sind, da diese nicht in jedem Haushalt vorhanden sind und auch nicht einfach im Supermarkt gekauft werden können. Normale AA-Batterien bräuchten zwar mehr Platz, allerdings wäre damit der Start noch einmal einfacher.
Der einzige Mangel, der mir aufgefallen ist, ist die fehlende Dokumentation des HATs zum Zeitpunkt meines Tests. Auf Nachfrage wurde gesagt, dass daran gerade gearbeitet wird. Ohne Dokumentation ist es für Anfänger u.U. etwas schwierig alle Funktionen des Boards nutzen zu können.
Wie gefällt dir der PiCar-X Roboter? Hast du lieber ein Bastelkit oder baust du lieber alles komplett selbst (z.B. per 3D-Drucker)?
2 Kommentare
diese proprietären Programmierschnittstellen machen mir einfach keinen Spaß. Ich versuche mich gerade mit dem Carla Simulator und Python. Ist zwar komplex und zeitaufwendig, aber so lernt man wirklich, was hinter KI und neuronalen Netzen steckt. Wer nur etwas rum spielen will, ist natürlich mit den „out-of-the-box“ Varianten auch bestens bedient. Und zusammen mit Kindern macht das sicherlich auch Spaß, um Interesse an der Thematik zu wecken.
Hallo, leider verbindet sich mein PiCar-X nicht mit dem WLan – der Raspi 4 wird in der Fritzbox angezeigt hat somit eine WLan Verbindung. Mit dem Handy geht es nur per Bluetooth und es wird auch auf dem Display die IP.Nummer auch angezeigt aber kein WLan Verbindung aufgebaut. Was kann das sein?