")
Vom Hersteller Sharp gibt es einige Infrarot Abstandssensoren, welche sehr einfach mit dem Raspberry Pi betrieben werden können. Hierbei gibt es verschiedene Abstandsmesser, welche unterschiedliche Distanz Bereiche abdecken. Diese Module funktionieren ähnlich zu Laser Distanzmessgeräten, allerdings mit Infrarot Licht. Dabei wird gebündeltes Licht mit einem Sender ausgestrahlt und durch einem Empfänger anhand des Einstrahlwinkels eine (analoge) Spannung durchgeleitet, womit die Distanz berechnet werden kann.
In diesem Tutorial wird anhand des Distanzsensors GP2Y0A02YK0F gezeigt, wie ein Abstand bestimmt werden kann. Nützlich kann dies z.B. im Auto als Car PC (Rückfahrkamera – Abstand), als Roboter Auto oder auch im Rahmen der Hausautomation.
Zubehör – Abstandssensoren

Insgesamt hat Sharp einige Distanzmesser im Angebot, wobei individuell geschaut werden sollte, welche für die Aufgabe passend ist. Dieses Tutorial ist auf den Sharp GP2Y0A02YK0F ausgelegt, welcher für Bereiche von 20cm bis 150cm geeignet ist. Entfernungen außerhalb dieses Bereichs werden nicht korrekt gemessen.
Folgende Module stehen zur Auswahl:
- GP2Y0A02YK0F (20cm – 150cm)
- GP2Y0A41SK0F (4cm – 30cm)
- GP2Y0A21 (10cm – 80cm)
- GP2Y0A710K0F (100cm – 550cm)
Solltest du einen anderen Sensor als den GP2Y0A02YK0F verwenden, so musst du die einzelnen Schritte ggf. anpassen. Die Datenblätter sind auf der Sharp Homepage verfügbar.
Weiterhin brauchst du noch folgendes:
Funktionsweise des Infrarot Abstandssensors
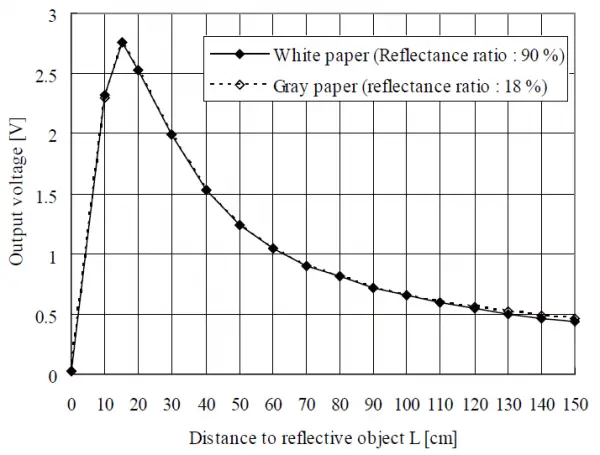
Dieser IR Sensor braucht eine Eingangsspannung zwischen 4.5V und 5.5V, kann also perfekt mit den 5V des Raspberry Pi’s betrieben werden. Dabei liegt laut Datenblatt eine unterschiedliche Spannung am Daten Pin an, je nach dem, wie weit das vom Sensor gemessene Objekt ist. Dies ist in folgendem Graphen sichtbar:
Anschluss des MCP3008
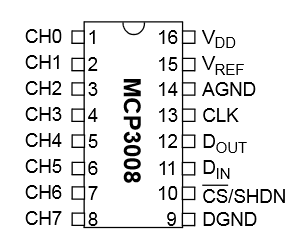
Da die ausgehende Spannung analog ist, müssen wir sie erst mit einem Analog-Digital Wandler „übersetzen“, sodass wir sie mir dem Raspberry Pi auswerten können. Dies geht am besten mit einem MCP3008 ADC.
Dieser Baustein wird über den SPI Bus des Pi’s angesteuert und hat acht Kanäle, an denen analoge Spannungen übersetzt werden können. Diese werden in 2^20 also 1024 Bereiche (0-1023) aufgeteilt. Wird der MCP3008 an 3.3V angeschlossen, entspricht ein Signal von 1 also 0.00322V (3.22mV). Da der SPI Bus des Raspberry Pi’s auf 3.3V arbeitet, sollte auch nicht mehr Spannung angelegt werden, da sonst die GPIOs beschädigt werden können.
Die ganze Schaltung sieht schematisch folgendermaßen aus:

| RaspberryPi | MCP3008 |
|---|---|
| Pin 1 (3.3V) | Pin 16 (VDD) |
| Pin 1 (3.3V) | Pin 15 (VREF) |
| Pin 6 (GND) | Pin 14 (AGND) |
| Pin 23 (SCLK) | Pin 13 (CLK) |
| Pin 21 (MISO) | Pin 12 (DOUT) |
| Pin 19 (MOSI) | Pin 11 (DIN) |
| Pin 24 (CE0) | Pin 10 (CS/SHDN) |
| Pin 6 (GND) | Pin 9 (DGND) |
Der Abstandssensor hat dabei lediglich drei Anschlüsse: Rot (5V), Schwarz (GND) und Gelb, was der Datenpin ist und an den MCP3008 ADC angeschlossen wird. Bei manchen werden dabei eventuell die Alarmglocken läuten und sagen, warum ein 5V Modul direkt angeschlossen wird, obwohl der SPI Bus des Pi’s nicht mehr als 3.3V Input bekommen darf. Im Datenblatt ist angegeben, dass die Ausgangsspannung des Sensors nie über 3V kommt (siehe Graph aus dem Datenblatt). Wer dennoch Angst hat, dass dem Pi etwas zustoßen könnte, der kann davor einen Spannungsteiler mit 2 Widerständen setzen, allerdings nimmt dadurch die Genauigkeit ab und auch meine verwendete Formel müsste neu berechnet werden. In meinen Tests kamen aber nie Spannungen über 2.7V an (GP2Y0A02YK0F). Bei den anderen Sharp Sensoren kann dies evtl. abweichen.
Software zum Auslesen der Distanz
Um den MCP3008 steuern zu können, muss der SPI-Bus aktiviert werden. Dies geht folgendermaßen:
sudo raspi-config
„8 Advanced Options“ -> „A6 SPI“ -> „Yes“.
Danach musst du den Neustart bestätigen.
In manchen Fällen muss das Modul (spi-bcm2708) auch noch in die /etc/modules Datei eingetragen werden. Dazu einfach
sudo nano /etc/modules
aufrufen und folgende Zeile am Ende hinzufügen (falls Sie nicht vorhanden ist):
|
1 |
spi-bcm2807 |
Nun kann die spidev Bibliothek installiert werden, falls das noch nicht geschehen ist:
sudo apt-get install git python-dev git clone git://github.com/doceme/py-spidev cd py-spidev/ sudo python setup.py install
Nachdem nun alle benötigten Pakete installiert sind, können wir das Skript zum messen der Distanz erstellen.
sudo nano ir_distance.py
Das Skript hat folgenden Inhalt:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
#!/usr/bin/python import spidev spi = spidev.SpiDev() spi.open(0,0) spi.max_speed_hz=1000000 def readChannel(channel): val = spi.xfer2([1,(8+channel)<<4,0]) data = ((val[1]&3) << 8) + val[2] return data if __name__ == "__main__": v=(readChannel(0)/1023.0)*3.3 dist = 16.2537 * v**4 - 129.893 * v**3 + 382.268 * v**2 - 512.611 * v + 301.439 print "Distanz: %.2f cm" % dist |
Führen wir es nun aus (sudo python ir_distance.py), nachdem wir auf ein Objekt zielen, wird der Abstand ausgegeben.
Was passiert hier genau? Zu erst einmal wird der analoge Wert (zwischen 0 und 1023) ausgelesen (Zeile 15). Da wir allerdings die Spannung wissen möchten, wird der Wert durch 1023 dividiert und mit 3.3 (Volt) multipliziert.
Achtung: In diesem Fall wissen wir (laut Datenblatt), dass die Ausgangsspannung nie über ca. 2.8V geht, obwohl wir den Sensor mit 5V versorgen. Andere Module (analog als auch digital) geben oft Signale mit Spannungen zurück, die so hoch wie die angelegte Spannung ist. Sollte man das nicht beachten, kann dies zu Schäden am Raspberry Pi führen.
In Zeile 16 des Skripts rechne ich die Spannung in Zentimeter um. Die Formel dazu habe ich hier gefunden und ein wenig angepasst. Dazu habe ich verschiedene Abstände getestet und die Faktoren etwas verändert, sodass die errechnete Distanz möglichst genau zutrifft. Wie ich anfangs erwähnt habe, ist diese Formel nur für den Sharp GP2Y0A02YK0F Sensor. Da die anderen Sensoren analoge Signale im ähnlichen Bereich liefern, muss diese Formel für die entsprechenden Sensoren angepasst werden (falls das jemand macht, würde ich mich freuen, falls er sie hierunter postet).
Alternativ kann man auch zwischen den Bereichen (Datenblatt) interpoliert werden, indem man alle Anhaltspunkte (Volt, Abstand) speichert und den bestimmten Wert ausliest und mittels linearer Interpolation den Abstand zu der gemessenen Spannung errechnet.
Ich habe früher oder später vor ein solches Modul an die Innenseite der Heckscheibe meines Autos zu befestigen und damit einen Distanzmesser beim rückwärts einparken zu haben – falls jemand noch nicht weiß, was er damit anstellen kann 😉
56 Kommentare
Hallo, und guten Tag,
meine Frage zum GP2Y0A02YK0F:
würde sich dieser Sensor auch als „Lichtschranke“ im Außenbereich eignen ?
D.h. wenn sich ein Objekt in einem Abstand von ca. 0,5 m an dem Sensor vorbei bewegt, sollte ein Signal ausgelöst werden.
Eine originale Lichtschranke möchte ich nicht verwenden.
b.r. Harry
Ja das sollte funktionieren. Allerdings müsstest du dann dauerhaft die Distanz abfragen oder den analogen Wert zu einem „Trigger“ umbauen (sodass ab einer bestimmten Spannung bspw. ein Transisotr/Relais öffnet und Strom an einen GPIO Pin gelegt wird, welchem du ein Event zuweist).
Vielen Dank für die freundliche Info.
In diesem Zusammenhang stellt sich mir die Frage, wie man die Auslösung des Sensors zeitlich erfassen und auslesen könnte (Python). Wäre es vielleicht möglich für dieses Vorhaben ein kleines Tutorial einzurichten?
br. Harry.S
Die einfachere Methode wäre alle X ms die Spannung zu messen und damit die Entfernung berechnen (wie hier im Tutorial mit einer zusätzlichen Schleife). Die andere Methode wäre u.U. etwas komplizierter, da weniger Programmierung dazu nötig ist, dafür mehr Messungen. Wenn auch noch andere daran Interesse haben, könnte ich in Zukunft dazu auch ein Tutorial machen.
Hallo Felix,
vielen Dank für Deine Nachricht.
Vielleicht habe ich mich etwas missverständlich ausgedrückt.
Ich möchte lediglich den Zeitpunkt dokumentieren, an dem der Sensor ausgelöst hat –
die Zeitangabe in eine Datei schreiben und diese bei Bedarf auslesen.
b.r. Harry
Naja den Zeitpunkt kannst du einfach mit
time.time()feststellen und in eine Datei schreiben ist auch nicht so schwer. Oder wo liegt das Problem genau?LG, Felix
Hallo Zusammen!
Ich würde gerne einen zweiten und am liebesten noch einen dritten Infrarot Sensor dieser Art an meinen Pi betreiben. Hab aber leider keine Ahnung wie ich das am besten mache … gibt es iwo möglichkeiten sich drüber zu informieren oder ist eventuell mal ein weiteres How-To dieser Art geplant?
Nunja, der MCP3008 hat 8 analoge Channels, d.h. du kannst mit einem Modul bis zu 8 analoge Sensoren auslesen. Ist im Prinzip das gleiche wie in diesem Tutorial, nur dass eben ein anderer Channel (statt CH0) ausgelesen ausgelesen werden muss (woran der zweite Sensor hängt).
Hallo Felix,
vielleicht magst Du mir einen Hinweis zu folgendem Problem geben:
Der Abstand zwischen dem Sensor und dem MCP3008 beträgt 18 Meter!
Aufgrund des Spannungsverlustes (Verbindungskabel = 3 X 1) ist die Sensor- Ausgangsspannung am MCP3008 zu gering.
Wie könnte ich die Spannung auf einen brauchbaren Wert erhöhen?
b.r. Harry
Hallo Harry,
also ich würde wenn dann den MCP3008 möglichst nahe zum Sensor stellen, da der Sapnnungsabfall bei analogen Werten zu falschen Messungen führt. Kannst du dickere Leitungen verwenden oder ggf. eine externe Stromversorgung für den MCP3008? Du müsstest mal den Widerstand des Kabels messen um festzustellen, wie hoch der Verlust sein wird (bis zu einem gewissen Wert ist das digitale Signal weiterhin auslesbar).
Hallo Felix,
da die Leitung bereits verlegt ist und auch die anderen Gegebenheiten kaum zu verändern sind, werde ich wohl auf den PIR – Bewegungsmelder zurückgreifen müssen.
Ist Dir vielleicht bekannt, ob dieser Sensor auch Bewegungen unter 3 Meter erfassen kann?
b.r. Harry
Hey Harry,
der PIR kann definitiv Bewegungen, die in weniger als 3m Abstand stattfinden wahrnehmen. Das Problem des Sensors werden eher weite Entfernungen sein.
LG, Felix
Hallo Felix,
Danke für Deine Info.
b.r.Harry
Hallo,
gib´s die möglichkeit die Schaltung umzubauen sodass man in einer Abstand von 50 m ein bewegendes Objekt detektiert? Oder hätten Sie Vorschläge wie man so ewtas it Rasp PI bauen kann?
vielen Dank
Die Sharp Module können je nach Modell, leider nur einen Abstand von maximal 10m erkennen. Es gibt einige Laser-Messer, die aber etwas teurer sind. Man müsste ein solches Gerät aufschrauben und die Datenpins anklemmen, um so auch am Raspberry Pi den Abstand auslesen zu können.
hi
ich suche genau solch einen Sensor, jedoch bis min 8m. Du schreibst es werden Sensoren bis zu 10 m angeboten, jedoch finde ich da nur welche bis max 550cm.
Könntest du mir da helfen ?
Lg Chris
Hi,
ich wollte kurz fragen ob schon jemand eine brauchbare Formel für den GP2Y0A41SK0F (4-30cm) hat, hatte versucht das ergebnis des anderen um ein 5tel zu reduzieren, da die reichweite ja auch jeweils das 5 fache ist, jedoch bringt das leider gar nix 🙁
mit der formel selbst kann ich leider aufgrund fehlender mathematikkenntisse nichts anfangen 🙁
lg
Harald
Hi;
ich habe das System mit dem GP2Y0A21 mit dem Ziel gebaut, dadurch eine Lichtschrank zu erhalten. Nach der Verkabelung habe ich im ersten Schritt einfach den Abstand auslesen wollen und auch wenn die Formel sicher nicht für diesen Typ korrekt ist, so müsste das Ergebnis ja dennoch immer gleich sein. Dies ist leider nicht der Fall. Die Ergebnisse weichen bei jeder Messung leider ab. Da sie aber alle im Ergebnis um die 6000cm liegen und ich ja im Prinzip nur eine Lichtschranke brauche, war mir dies erst einmal egal. Ich wollte dann den „Alarm“ einfach auslösen, wenn der Wert auf unter 3000 fällt. Die Endlosschleife läuft, jedoch wird der Alarm auch so sehr oft ausgelöst ohne dass etwas in die Schranke kommt. Umso häufiger ich den Wert auslese, um so größer sind die Schwankungen. Kann mir vielleicht jemand sagen, wie ich dieses Problem in den Griff bekomme?
Vielen Dank
Deniver
Schau dir mal nur die reinen analogen Werte an (0-1023) und prüfe, ob der abgebildete Wert laut Datenblatt mit dem Abstand übereinstimmt. Es könnte natürlich auch sein, dass der Sensor einen Fehler hat.
Hi, ich würde gerne den Füllstans meines Heizöltanks messen. Der Ultraschallsensor ist aufgrund der Form meiner Tanks ungeeignet. Denkst Du das würde per Infrarot gehen? Oder wird da auch durch einen Kegel gemessen? Und kann das Teil Flüssigkeit also Öl messen?
Danke
Sollte tendentiell funktionieren, aber ich weiß nicht, ob die Oberfläche von Öl dafür geeignet ist. Im Zweifel würde ich es einfach mal ausprobieren 🙂
Hi Felix,
ich habe mir das mal nachgebaut. Leider werden mir immer 301.4cm angezeigt wenn ich das skript auslese. Ich habe schon beim Sharp Sensor nachgemessen und der funktioniert. Die Spannung am Analogausgang verändert sich je nach Abstand. Den MCP3008 hatte ich erst genau andersrum angeschlossen und daher einen Defekt in Verdacht. Aber den habe ich nun ausgetauscht und das gleiche Resultat. Ich habe als Bauchgefühl das Skript im Verdacht, irgendwas stimmt da wohl nicht wenn er immer nur einen statischen Abstand ausgibt. Aber ich komme nicht drauf was die Ursache genau ist. Kannst du mir da behilflich sein?
Ich habe das Ganze nun mal mit der Adafruit Libary ausprobiert.
https://learn.adafruit.com/raspberry-pi-analog-to-digital-converters/mcp3008
Dort bekomme ich auf auf Channel 1 auch entsprechende Werte dort wo der Sensor angeschlossen ist (den Channel habe ich in deinem Skript schon geändert). Allerdings auch auf den anderen Channels.
Reading MCP3008 values, press Ctrl-C to quit…
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
———————————————————
| 0 | 483 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 479 | 0 | 6 | 8 | 11 | 19 | 46 |
| 199 | 480 | 240 | 279 | 280 | 284 | 288 | 280 |
| 273 | 483 | 275 | 213 | 212 | 202 | 197 | 157 |
| 0 | 480 | 0 | 0 | 0 | 0 | 0 | 0 |
| 18 | 473 | 14 | 19 | 24 | 32 | 49 | 94 |
| 287 | 476 | 288 | 232 | 227 | 230 | 223 | 201 |
| 200 | 491 | 229 | 44 | 0 | 0 | 0 | 0 |
| 0 | 481 | 0 | 0 | 5 | 8 | 17 | 43 |
| 292 | 482 | 293 | 279 | 279 | 283 | 285 | 274 |
| 257 | 484 | 261 | 196 | 183 | 176 | 162 | 111 |
| 0 | 475 | 0 | 0 | 0 | 0 | 0 | 0 |
| 68 | 482 | 197 | 280 | 283 | 282 | 287 | 281 |
| 282 | 478 | 271 | 208 | 196 | 190 | 176 | 133 |
| 0 | 482 | 0 | 0 | 0 | 0 | 0 | 0 |
| 51 | 477 | 24 | 34 | 137 | 283 | 291 | 284 |
| 277 | 483 | 281 | 223 | 213 | 208 | 201 | 170 |
Nun frage ich mich warum kommt auf den ungenutzten Channels was an und weshalb liest dein Skript das nicht korrekt aus.
An den ungenutzen Channeln ist keine (positive oder negative) Spannung, daher wird diese zufällig festgelegt. Das selbe Verhalten haben die GPIOs wenn du sie ausließt, ohne dass sie an etwas angeschlossen sind.
Hallo Dirk,
hast du die Ursache des Problems damals gefunden? Ich habe nämlich aktuell das gleiche Problem mit 301.44 cm, obwohl der Entfernungsmesser die richtige Spannung ausgibt und alles richtig verdrahtet ist.
Vielen Dank im Voraus!
hallo hast du eine Lösung gefunden
Hallo Felix,
Kannst du vielleicht Zeile 16 etwas genauer erklären? Ich verstehe nicht wo die Werte herkommen die da angegeben sind. Auch im Originalbeitrag hat sich mir das nicht erschlossen.
Vielen Dank
Andreas
Naja die brauchen eine Parabel die nur einen Eingabeparameter nimmt und müssen diese entsprechend modellieren, sodass der Graph aus dem Datenblatt entsteht. Wenn du eine besser Formel erstellen kannst, die besser passt, immer her damit 🙂
Sensorspannung bei unterschiedlichen Abständen auslesen, in excel einen Graphen erzeugen, Trendlinie(Regression) mit der grüßtmöglichen Genauikeit (Korrelation) hinzufügen. Die angezeigte Übertragungsfunktion übernehmen.
Hallo Felix,
ich habe heute auch versucht, dass System so nachzustellen und auch ich bekomme auch nur die Zahl 301.44 cm als Ergebnis angezeigt. Die Verkabelung habe ich x-mal kontrolliert und auch das Modul spi_bcm2835 ist geladen. Es sieht ja so aus, als wenn die Funktion readChannel nichts zurückgibt, denn es wird 0 durch 301.439 geteilt, was der Inhalt der Variable dist ist, wenn man sich den ausgeben lässt.
Irgendeine Idee? Ich wäre echt sehr an dieser Lösung interessiert 🙂
Danke und Gruß
Hallo,
wie exakt bzw. mit welcher Toleranz arbeiten denn die Sensoren? Auch würde mich interessieren, welcher Durchmesser der Strahl hat und ob sich dieser konzentrisch vergrößert.
Vielen Dank im Voraus!
Das wird wahrscheinlich von Model des Sensors unterschiedlich sein und im Datenblatt stehen.
Hallo zusammen,
hat sich jemand mal Gedanken über die Genauigkeit gemacht.
Die Infrarot-LED zieht kräftig Strom und die Ausgangsspannung
ist entsprechend unruhig.
Versorgungsspannung abblocken?
Ausgangsspannung mit Tiefpassfilter versehen?
Zuleitungen und Abgabespannung getrennt verlegen?
Hi Felix,
noch mal ein Versuch nach einer Lösung zu dem Problem mit den 301.44 cm zu fragen. Ich komme dem so nicht auf die Spur. Hat es hier vielleicht jemand lösen können!?!
Habt Dank.
Gruß
Tobias
Me too.
Please help me. I get 301.44 m everytime. Is this bug?
Ich hab mal die Gleichung untersucht. Aus dem Datenblatt von Sharp soll eine Formel erstellt werden. Uns interessiert ja, welche Spannung (also x, bzw v im Programm) welchen Abstand (also y, bzw. dist) ergibt. Sharp gibt die Umkehrung (leider) davon grafisch an. Wenn man also die Achsen vertauscht ergibt sich eine Kurve, die natürlich nur im Bereich von 20 bis 150 cm vernünftige Werte anzeigt, sonst wüsste ich nicht, ob z.B. 2V als 30 oder 8 cm zu verstehen ist. Habe also Messpunkte, so gut es geht ausgelesen und in ein einfaches Grapherprogramm (Grapher am Mac) eingetragen, dazu die Gleichung y = 16,2537 x^4 + … 301,439, die irgendjemand gefunden hat (Annäherung durch ein einfachen Polynom 4. Grades durch hier maximal 5 Messpunkte, mehr kann ja nicht gehen, da 5 Koeffizienten errechnet wurden) . Man sieht dann gleich, das die Funktion nur im Bereich von etwa 70 – 140 cm einigermaßen die Messwerte trifft, sonst liegt die Abweichung bei 5 cm und mehr. Also hochgenau werden die Messungen damit nicht, muss ja auch nicht immer sein, vermutlich haben die Dinger auch Fertigungsstreuungen. Wenns geht ist Ultraschall genauer und billiger.
Als Funktion müsste eine e-Funktion alleine von der Physik her besser passen. Ich habe jetzt kein schweres Geschoß wie Mathematica drauf angesetzt, sondern nur mit Grapher gespielt, z.B. die Gleichung y = 5*e ^(5,5/(x+1,2)) liefert schon genauere Ergebnisse. Oder man sucht eine Softwarelösung, bei der auf eine Tabelle mit Zwischenwertberechnungen zugegriffen wird.
Für die Kurve des 550cm – Modells funktioniert die Gleichung y = 2*e(8/(x+0,1))+35 einigermaßen genau.
…natürlich y=2*e^(8/(x+01))+35…
Gibt es mittlerweile eine Lösung zu dem 301.44 cm Problem?
Hi, ich sitze auch am 301,44 Problem fest.
Gruß Ralf
Hallo Zusammen,
ich hatte auch das 301.44 cm Problem, und habe im Netz mal etwas gestöbert und das Skript wie folgt abgeändert. Nun scheint es zu funktionieren. 🙂 Ich habe von Python nur minimale Kenntnisse,
sollte ich einen Fehler reingebaut haben, bitte ich um Feedback.
lg Tobias
#!/usr/bin/python
import spidev
spi = spidev.SpiDev()
spi.open(0,0)
spi.max_speed_hz=1000000
def readMCP3008(channel):
adc=spi.xfer2([1,(8+channel)<<4,0])
wert = ((adc[1]&3) << 8) + adc[2]
return wert
if __name__ == "__main__":
v=(readMCP3008(0)/1023.0)*3.3
dist = 16.2537 * v**4 – 129.893 * v**3 + 382.268 * v**2 – 512.611 * v + 301.439
print "Distanz: %.2f cm" % dist
Welches Kabel wird eigentlich am Sensor angeschlossen? Es werden F2F-Jumperkabel genannt, aber müssen die vom Steckertyp Dupont sein? Außerdem bin ich verwundert, dass hier nur F2F genannt wird. Benötige ich nicht M2F, damit ich in das Steckbrett etwas einstecken kann? Sehe ich richtig, dass das Kabel, dass beim Sensor mitgeliefert wird, dann in den Female-Stecker eingesteckt werden muss?
Robotshop empfiehlt bspw. ein SIRC-01 Sharp GP2 IR-Sensorkabel – 8 „, was man vom Sensor direkt auf die GPIO-Pin-Stiftleiste stecken können müsste.
Gibt es vielleicht ein Bild, dass den tatsächlichen und nicht den schematischen Aufbau zeigt?
Hallo,
kann dieser Abstandssensor auch für Wasser verwendet werden (Füllstand einer Zisterne)?
Ich würde schätzen ja, aber du müsstest es ausprobieren.
wie sehe ich die werte?
das sind alle Fragen
Siehe Schaubild im Datenblatt.
Das Ergebnis lautet immer 301.44 cm. Egal, wie nah ein Objekt ist und wie weit entfernt.
Dann scheint der analog gemessene Wert nicht zu stimmen…
Hallo hast du eine Lösung gefunden? Habe das selbe Problem.
Hallo zusammen,
ich habe mal ein ganz ähnliches Projekt mit Temperaturmessung gemacht. Im Kern ist es aber gleich (ADC):
evil2000.de/Wiki/Thermistor103JT
Dort habe ich kurz die Steinhart-Hart-Gleichung erwähnt. Es ist die selbe Gleichung welche hier mit dem IR-Abstandsmesser genutzt wird. Wenn ich mir das Schaubild des Sharp GP2Y0A02YK anschaue, kommt das der Kurve eines Thermistors sehr nahe.
Vielleicht lohnt es sich wenn jemand mal verschiedene Abstände misst und die Spannungen dazu in eine Tablle einträgt. Anschließend füttert man diese der thermistor.1.0.jar. Vielleicht werden die Werte für [a0 .. an] dann genauer und man kann auf eine lineare Interpolation verzichten.
VG
Hallo zusammen
301.44cm erhält man, wenn in der Formel v=0V ist. Wenn man die Spannung misst, ist v≠0V. Das bedeutet, dass der ADC MCP3008 nicht richtig arbeitet. Warum ist das so?
Mit diesem Problem habe ich mich schon in verschiedenen Tutorials herumgeschlagen! Es kommt daher, dass wir inzwiscchen mit RaspberryPi 4 arbeiten. Dieser arbeitet zu schnell für den MCP3008, sofern man den RaspberryPi 4 nicht „bremst“.
Tobias hat am 1.5.2019 schon die Lösung publiziert! Man muss den Befehl spi.max_speed_hz=1000000
einfügen, weil der MCP3008 bei VDD=2.7V (was in der Nähe von 3.3V liegt) nur mit 1.35MHz betrieben werden kann! Der Befehlt beschränkt die Transferrate des SPI-Buses auf 1MHz.
Viel Erfolg!
Habe es für mein Roboterauto wie folgt gelöst:
distance = 10650.08 * pow(read,-0.935)
https://github.com/Michdo93/robotcar/blob/master/driver/sensor/ir_GP2Y0A02YKOF.py
Das Problem und die Lösung habe ich hier gefunden:
http://arduinomega.blogspot.com/2011/05/infrared-long-range-sensor-gift-of.html
Vielen Dank für den hochinteressanten Beitrag. Ich habe da einen Traum, wer weiß ob das machbar ist. Ich muß meine neue Wohnung ausmessen, weil es leider keinen Plan (mehr?) gibt. Ich habe allerdings wenig Lust dies per Hand mit einem Lasermeßgerät zu machen. Ist auch nicht so prickelnd. Mir würde da eine Lösung vorschweben, in der meinen Raspberry mit einem Messgerät montiert an einem kleinen Motor verbinde. Wenn jetzt das Messgerät den ganzen Raum abtastet, dann müßte ich ein 3D Modell bekommen, das dann „nur“ noch in Linien und Flächen konvertiert werden muß. Rein theoretisch. Welche Lasermodule würdet Ihr mir da empfehlen ? Oder hat dies schon ein anderer implementiert, will ja nicht das Rad neu erfinden.
Vielen Dank für Ideen oder Infos
Erich
Dafür sind die Lidar Sensoren gut geeignet, aber leider sehr teuer.
Hallo,
vielen Dank für das Tutorial und die Kommentare sind auch sehr interessant.
Ich habe das Vorhaben, Infrarotsensoren, mit genau dem vorgeschlagenen Aufbau, für eine Triangulationsmessung zu verwenden. Genauer möchte ich den Durchmesser eines runden Querschnittes, bei unbekannter Positionierung im Messfeld, mit drei Sensoren messen.
Abgesehen von Messungenauigkeiten auf Grund der Oberflächenbeschaffenheit und Reflexionsgrad, wie genau sind die GP2Y0A02YK0F bei gleichbleibenden Randbedingungen?
Kann ich mit diesen im 1mm Bereich (+-0,5mm) oder sogar genauer messen?
Ist die Genauigkeit am Ende sogar eher von der Software oder der Mathematik (Kurve) abhängig?
Vielen Dank schon mal und viele Grüße
Qui